
In August Team Black Sheep announced a new FPV racer on FPVlab.com, the TBS Gemini, a small hexacopter made for racing. It supposedly has a top speed of up to 100 km/h (~60 mph), is less than 400g light (~1 lb and a bit) and comes fully packed with all the FPV gear. Finally, the wait should be over soon. TBS just announced that the first batch started shipping. YESS! My order is also lined up and hopefully I can play with the little flying crab very soon.

Honey, I shrunk the … quadcopter
At just 40mm wide the Blaxter X40 looks very much like a small toy model with a bunch of blinking LEDs and very unlikely to actually fly. The kids’ hand-sized remote control adds to the whole impression of a non-functional mockup. So the surprise is all the bigger when the little guy actually takes off. It’s a real quadcopter! Continue reading Honey, I shrunk the … quadcopter
Zaggometry: How to log your flights with the Taranis
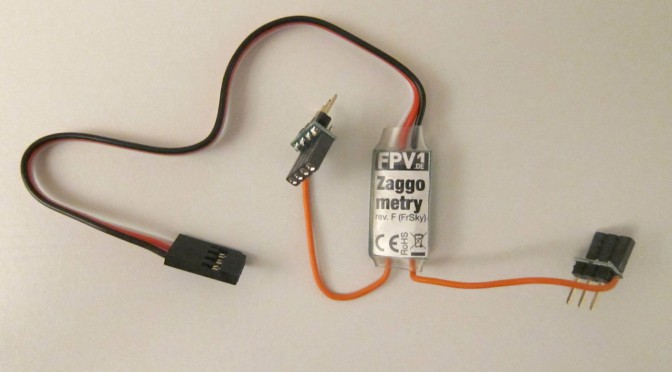
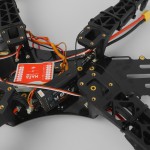
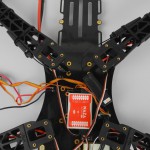
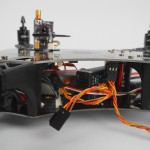
The Zaggometry is a clever little piece of electronics which can read the NAZA GPS coordinates of you copter and send it over the telemetry link down to your Taranis RC-remote for display and logging. In other words, it is a bit like a Flytrex Live flight recorder for your Taranis. The 29€ Zaggomety was developed and is produced(!) by Eberhard Rensch in Germany. In this article I would like to show how I installed it in my TBS Discovery Pro and the data I logged during a test flight (video).
Continue reading Zaggometry: How to log your flights with the Taranis

Taranis upgrade to openTX 2.0
I usually never change a running system but I wanted to play with some new telemetry sensors and all the new LUA scripting features of the openTX 2.0 on my TBS Disco Pro. This is (not yet) an official FrSky firmware. They are stuck at some older, feature restricted 1.x version and they might never offer some of the newer features, as they consider the Taranis a feature complete product. Well, I don’t.

Lady in Lavender
The beautiful intense color of the lavender dominates the landscape of the entire Provence. The magic happens every year in early summer for a couple of weeks and it attracts many painters, photographers and mysterious ladies. Have a look yourself!
The filming took place during a photography workshop with Christian Heeb.
Gallery: 2nd TBS Discovery Pro build









The image gallery of the first build can be found here.

TBS Discovery Pro Showreel
The video shows a compilation of shots taken in and around Zurich in Switzerland. I was flying above the clouds searching for the sun, blowing autumn leaves in the forest and flying over water and chasing cars. The Discovery Pro is a beast and a lot of fun. Want to build your own? Check out my build log: part1, part2 and part3!

How to bind X8R to the FrSky Taranis in different modes
The official instructions for binding the X8R receiver to the Taranis are quite confusing and cryptic. Therefore, I try to give step by step instructions about how to bind them in the different available modes as well as some background information. The whole process is split into a preparation phase, mode selection and a binding procedure.
Continue reading How to bind X8R to the FrSky Taranis in different modes

Spring in Zurich
Today was a beautiful warm spring day and I decided to do what all the people from Zurich are doing, going down to the lake. While the promenade was severely crowded, I had the sky all for myself 😉


[twoclick_buttons]
Nomen est omen: Crashpilot
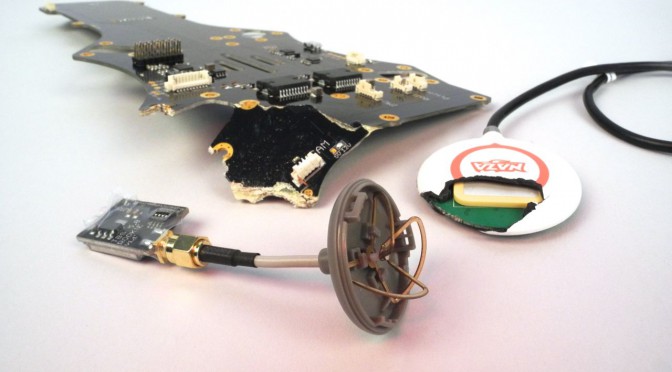
Well, well, we all knew it had to happen. One of my copters crashed. It fell out of the sky, more then 30m onto asphalt. It looked really horrible. The Disco scattered into peaces, it had a totally broken frame with many damaged parts lying around. I could salvage a few pieces from the debris, but I will need to rebuild a new copter from scratch.
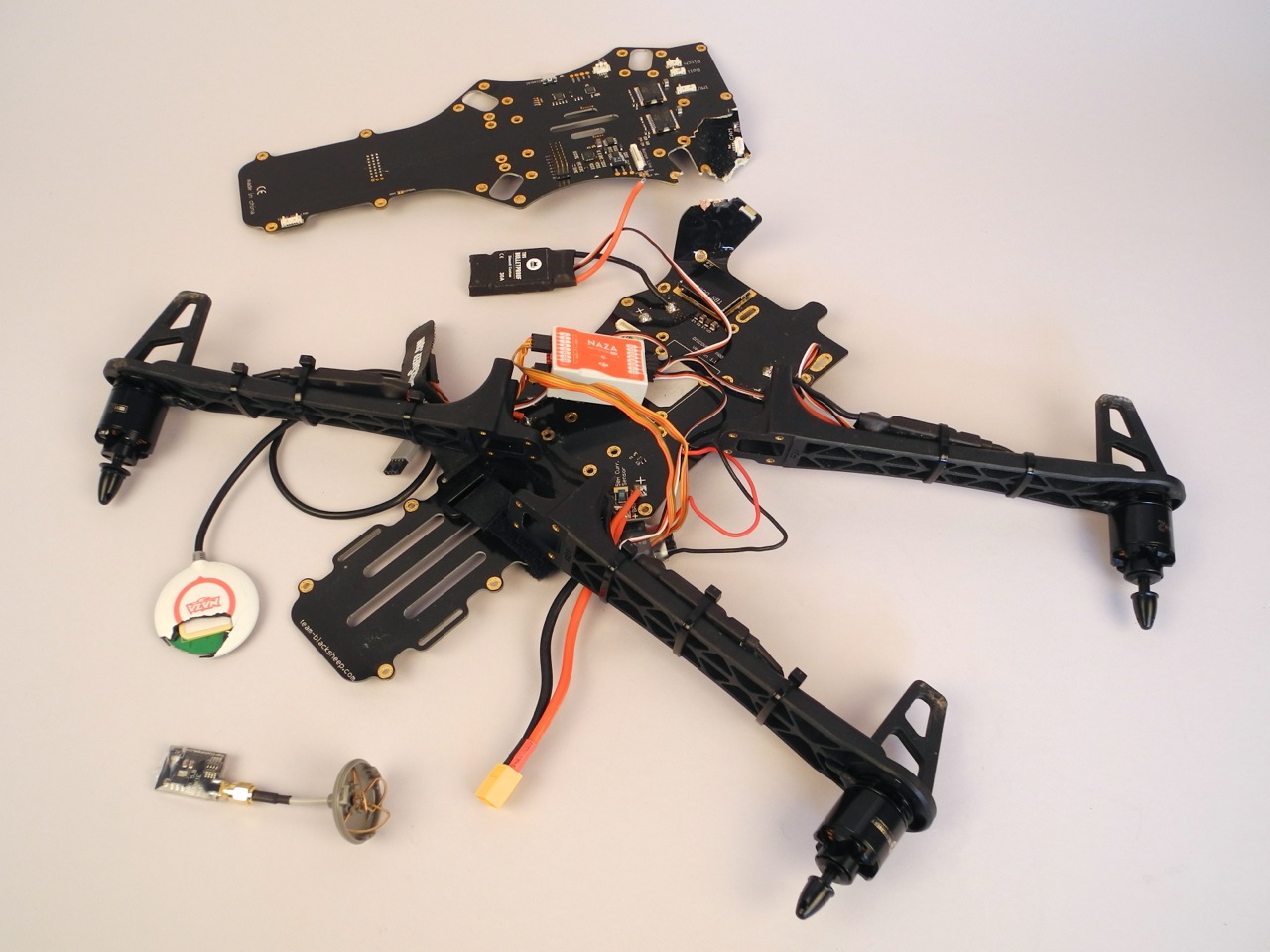
Luckily nobody got injured and nothing on the ground got damaged. So the worst thing is, that I don’t fully know why it happened. It could have been the almost empty battery, but I could also have been the camera controller board flying into the propellor. I guess I need to do more tests once I have rebuilt my Discovery. I just hoped I would not have to build a second Discovery Pro so soon again 🙁