I’ve recently stumbled upon ayvri.com a new website (initially called doarama.com) to visualize your flight paths in a 3D map, alongside the original drone video. Even tough the website is till beta, it looks really awesome. Here is my Zaggometry test flight from last summer. Check it out!
All I needed to provide was the GPS coordinates of the Discovery Pro drone in .gpx format and a link to the corresponding youtube video. This is pretty simple.
You can swap the position of the video and 3D map, by clicking the smaller one. The visualization needs WebGL, which is fine with Firefox and Chrome and Internet Explorer. In Safari it first needs to be enabled.
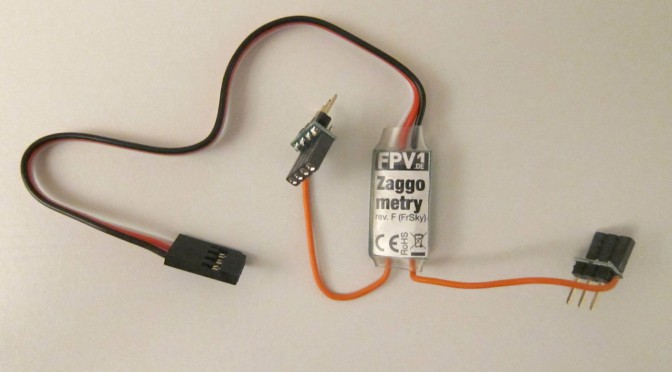
The Zaggometry is a clever little piece of electronics which can read the NAZA GPS coordinates of you copter and send it over the telemetry link down to your Taranis RC-remote for display and logging. In other words, it is a bit like a Flytrex Live flight recorder for your Taranis. The 29€ Zaggomety was developed and is produced(!) by Eberhard Rensch in Germany. In this article I would like to show how I installed it in my TBS Discovery Pro and the data I logged during a test flight (video).
As we all know, my first TBS Discovery Pro crashed horribly with no hope for easy repair. So what should one do with all The FPV gear and not model to fly? Right. Build a second TBS Discovery Pro. It should not take too long, as I’ve documented my last build in detail (build log part1, part2 and part3). This time however I want to make some minor modifications:
move the X8R receiver inside the frame next to the NAZA instead of having it sitting on the back outside.
repositioning of the video antenna to the top of the frame for better reception
Add RSSI connection for the OSD
Put the GPS puck on the stick for better reception
The 2nd TBS Discovery Pro arrived in a similar, but slightly lighter colored box.
The new gimbal dampener arrived with the wrong number of screws. I should have some spare ones left from the last build.
My 2nd TBS Discovery Pro came with the new improved gimbal dampening arm attached to the back. It should stabilize the camera at high speeds.
The new gimbal stabilizer will go deep into the frame, close the the NAZA in order to stabilize the camera rotational movements.
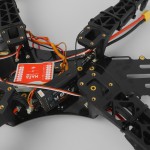
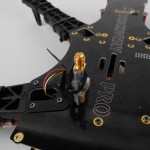
In order to fit everything, the NAZA controller is placed slightly forward outside the marked rectangle. This way, the edge of the X8R is just short of to the mounting hole for the red spacers which will later connect to the top plate.
The X8R antennas can be zip tied to the arms. Both, the antenna and the arms, have a rounded shape which makes the placement relatively flush and solid. The zip ties keep them in place, minor movement is still possible.
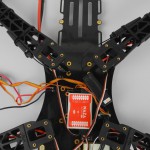
Closeup of the X8R lying sideways inside the frame.
Different angle of the frisky X8R placement inside the frame, flush to the NAZA.
The X8R is placed lying on the side, with the short cables going out to the antennas on the two arms.
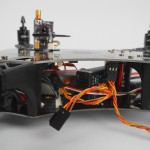
On my 2nd build, I’ve placed the video transmitter on top. TBS sells a special mount, which is not part of the kit and needs to be ordered separate.
Here I use a FLAME WHEEL VTX mount with a TBS 5.8GHz transmitter
This time I’ve attached the NAZA LED IMU to the bottom of one of the ESCs.
On my second build I try to cram the X8R receiver inside the frame, next to the NAZA with the two antennas on the back arms.
The image gallery of the first build can be found here.
The official instructions for binding the X8R receiver to the Taranis are quite confusing and cryptic. Therefore, I try to give step by step instructions about how to bind them in the different available modes as well as some background information. The whole process is split into a preparation phase, mode selection and a binding procedure.
In the third part of the build log I would like to cover the setup and configuration of the Taranis RC with the TBS Discovery Pro. After covering the mechanical build in part 1 and part 2 of the build log, this part will be about the wiring and programming of the remote control. Due to a crash I’ve build the copter a 2nd time.