
In a dark, dark wood there sat three dark, dark men;
And the dark, dark men were wearing dark, dark googles;
But the dark, dark googles had NO dark, dark screens;
Because on the bright, bright screens there were…… drones!
Category Archives: Quadcopter

9 FAA proposed small drone rules
Hey, chap!
Before you start to explore the world through the eyes of drone technology, there are certain terms and conditions that you should make yourself familiar with. First article by guest author Alastair Baker. Continue reading 9 FAA proposed small drone rules

Zippy, the zip tied FPV racer on Kickstarter
Today Benjamin from Austin, TX sent me his Kickstarter campaign for the Zippy, a 3D printed quadcopter frame only held together with zip ties. While there are tons of interesting Kickstarter campaigns I think this one is worth mentioning as it proposes a conceptually new and simple way of building a quadcopter frame inherently designed to be easily repaired and fine tuned out in the field. Exactly what a crash pilot like me would need to advance in FPV racing. Genius!
Continue reading Zippy, the zip tied FPV racer on Kickstarter

Find your drone guide part 1: Drone-Personality
Quite often I get asked, “which is the best quadcopter?” or “which drone should I buy to get started?” There is no simple answer besides; “It depends”. In my experience it largely depends on your main motivation to fly a quadcopter. So the better question is: What is your Drone-Personality? Are you a Pilot, a Cameraman or an Engineer? May I present the FPVblog Find your drone guide! 😉
Continue reading Find your drone guide part 1: Drone-Personality

TBS Gemini, new FPV racer is shipping
In August Team Black Sheep announced a new FPV racer on FPVlab.com, the TBS Gemini, a small hexacopter made for racing. It supposedly has a top speed of up to 100 km/h (~60 mph), is less than 400g light (~1 lb and a bit) and comes fully packed with all the FPV gear. Finally, the wait should be over soon. TBS just announced that the first batch started shipping. YESS! My order is also lined up and hopefully I can play with the little flying crab very soon.

Honey, I shrunk the … quadcopter
At just 40mm wide the Blaxter X40 looks very much like a small toy model with a bunch of blinking LEDs and very unlikely to actually fly. The kids’ hand-sized remote control adds to the whole impression of a non-functional mockup. So the surprise is all the bigger when the little guy actually takes off. It’s a real quadcopter! Continue reading Honey, I shrunk the … quadcopter

I did it again! 2nd Discovery Pro build
As we all know, my first TBS Discovery Pro crashed horribly with no hope for easy repair. So what should one do with all The FPV gear and not model to fly? Right. Build a second TBS Discovery Pro. It should not take too long, as I’ve documented my last build in detail (build log part1, part2 and part3). This time however I want to make some minor modifications:
- move the X8R receiver inside the frame next to the NAZA instead of having it sitting on the back outside.
- repositioning of the video antenna to the top of the frame for better reception
- Add RSSI connection for the OSD
- Put the GPS puck on the stick for better reception
Gallery: 2nd TBS Discovery Pro build









The image gallery of the first build can be found here.
Nomen est omen: Crashpilot
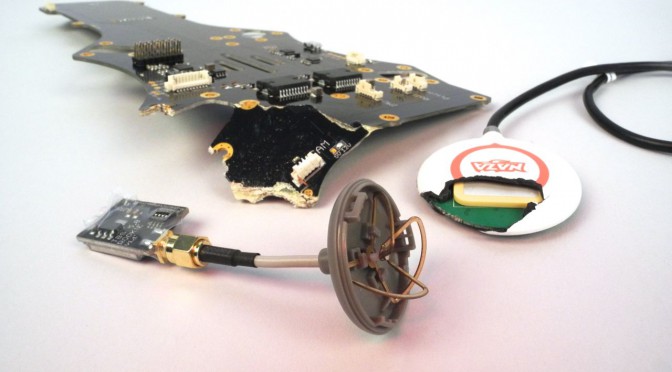
Well, well, we all knew it had to happen. One of my copters crashed. It fell out of the sky, more then 30m onto asphalt. It looked really horrible. The Disco scattered into peaces, it had a totally broken frame with many damaged parts lying around. I could salvage a few pieces from the debris, but I will need to rebuild a new copter from scratch.
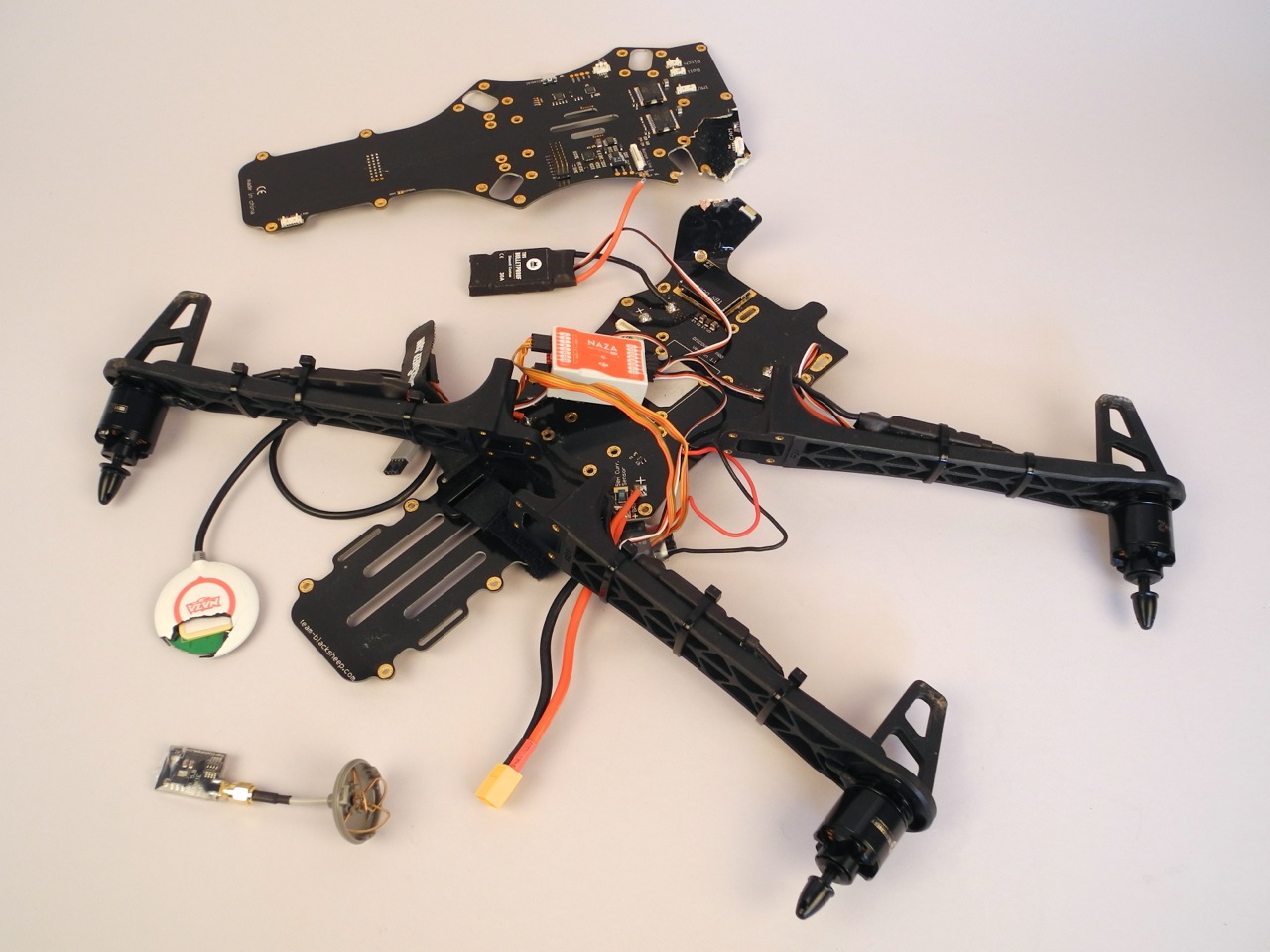
Luckily nobody got injured and nothing on the ground got damaged. So the worst thing is, that I don’t fully know why it happened. It could have been the almost empty battery, but I could also have been the camera controller board flying into the propellor. I guess I need to do more tests once I have rebuilt my Discovery. I just hoped I would not have to build a second Discovery Pro so soon again 🙁

Build Log TBS Discovery Pro, Part 2
This is part 2 of the epic TBS Discovery Pro build. It got a bit delayed because I really wanted to show you the Leistkamm Video before finishing my second quadcopter. But now, back to the Discovery Pro.
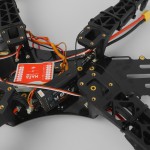
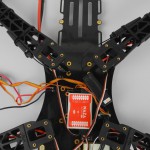
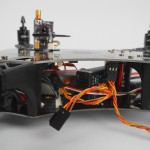
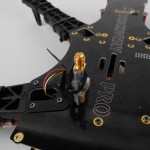
After assembling the gimbal and motors and soldering the bottom plate in the TBS Discovery Pro build part 1, I put all the pieces together. It’s relatively straight forward to mount the four arms and red spacers to the bottom plate and then close up the sandwich with the top pcb plate. All the electronics and wiring is integrated into the frame and aside from the gimbal and controller, there are only a few cables connecting to individual parts. During the build I got to appreciate zip-ties for fixing all sorts of things, such as the electronic speed controllers (ESCs) onto the arms and the flight camera to the frame. The last piece I screwed on was the gimbal and it slides from the front.
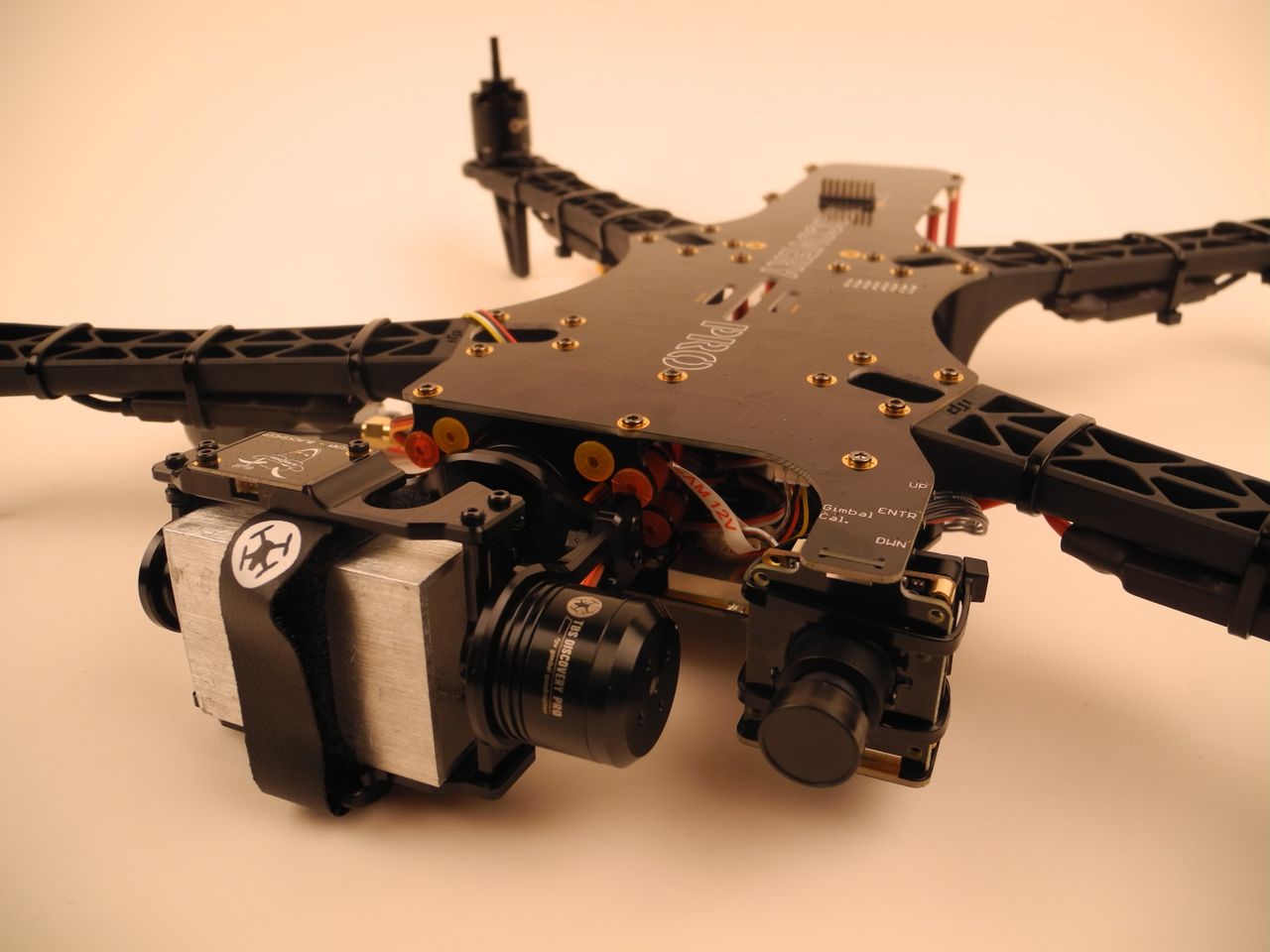
At this point of the build I realized for the first time that something was a bit strange with the gimbal cables. I had to cross them to reach the appropriate connectors on the frame, which seemed a bit like a design flaw. But as it turned out later, I had misassembled the roll axis by 180 degrees, so the pitch motor facing the fpv camera instead of away from it. It took me until after the first power-up to realize this. The crossed cables lead to a second mistake: mixed up roll and pitch motors. The result of this is a hysterically spinning gimbal, rotating constantly as if were fully drunk. After fixing the gimbal orientation and connecting the motors into the correct pitch/roll connector everything was OK. The gimbal was level as expected. Wow, it looked cool!

I finished the ‘mechanical’ part of the build by adding more electronics, such as the video transmitter with the 5.8GHz cloverleaf antenna on the front right arm and the FrSky RC receiver X8R in the back on top.
More images in the build gallery. In the next part of the build log I will set up the Taranis RC radio and NAZA flight controller.